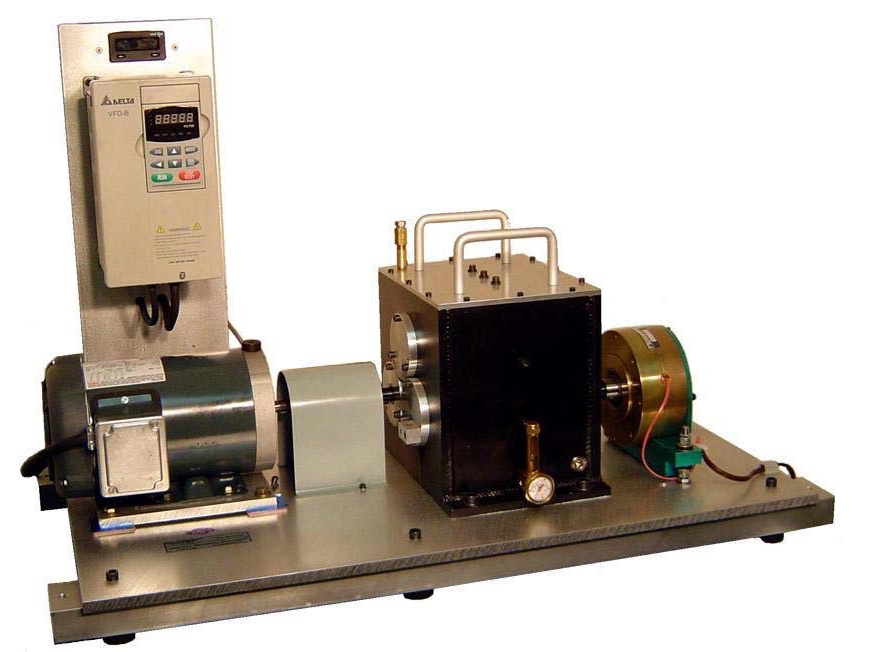
Gearbox Dynamics Simulator
 |
View Presentation Print Brochure |
|
|
Why GDS
Features
Specifications
Basic GDS
Option Kits
Packages

|
Please send us your feedback.
|
|
| Name: | |
| Email: | |
| Comments: | |


|
|
| Thank you for registering with with us, an email with your login details has been sent to the address you provided. Please check your email and click on "Activate My Account" to validate your account. | |
|
|
|


|
|
View Presentation Print Brochure |
|
|
| Electrical | |
| Motor | 3 Phase, 3 HP motor, pre-wired self-aligning mounting system for easy installation/removal |
| Drive | 3 HP variable frequency AC drive with multi-featured front panel programmable controller |
| RPM range | 0 to 5000 rpm variable speed |
| Tachometer | Built-in tachometer with LCD display and one pulse per revolution analog TTL output for DAQ purposes |
| Voltage | 230 VAC, Three phase, 60/50 Hz |
| Mechanical | |
| Shaft Diameter | 1″ diameter; Turned, Ground, & Polished (TGP) steel |
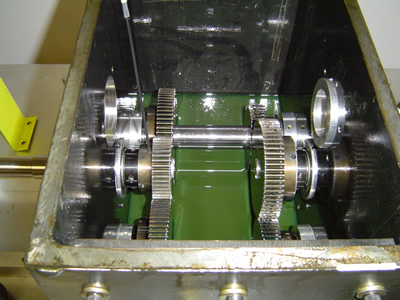
| Parallel Gearbox | 2 stage, 2.5 maximum ratio per stage, spur or helical gears |
| Gearbox Bearing | Deep groove ball bearing or oil-impregnated bronze sleeve bearing |
| Magnetic Brake | 4-220 lb.in capacity magnetic particle brake |
| Foundation | 1/2″ (12.7 mm) die cast aluminum base, base stiffener and eight rubber isolators |
| Physical | |
| Weight | Approximately 200 lb |
| Dimensions | L=39″ (100cm), W=20″(50cm), H=24″ (60cm) |
| The GDS Provides a basic setup for performing gearbox experiments and for learning vibration signatures of gearbox and bearing malfunctions.However.a detailed investigation of particular and more advance vibration phenomena will acquire additional attachments and fixtures which are available through optional kits. | |
Bearing Fault Kit (G-BFK-1) | |
|  |
Defective spur gears (G-SDG) | |
|  |
Helical gears set (G-HG) | |
|  |
Defective helical gears (G-HDG) | |
|  |
Eccentric Spur Gear (G-ESG) | |
|  |
Shaft encoder (G-ENC) | |
|  |
PC Motor Control Kit (G-PCK) | |
|  |
PC Load Control Kit (G-PCLK) | |
| |
AC Motor With Built-In Rotor Unbalance (G-UBM) | |
| |
AC Motor With Built-In Rotor Misalignment System (G-MAM) | |
| |
AC Motor With Built-In Bowed Rotor (G-BRM) | |
| |
AC Motor With Built-In Faulted Bearings (G-FBM) | |
| |
AC Motor With Built-In Broken Rotor Bars (G-BRBM) | |
| |
AC Motor With Stator Winding Faults (G-SSTM) | |
| |
AC Motor With Voltage Unbalance & Single Phasing (G-VUSM) | |
| |
| Package # 1 : | Basic GDS+ Kits for in-depth studies of gearing concepts |
| Package # 2 : | Basic GDS+ Kits in-depth studies of gearing concepts and motor diagnostics with instrumentation |
| Option kit | PKG 1 | PKG 2 | |
|---|---|---|---|
| Bearing Fault Kit | G-BFK-1 | x | x |
| Defective spur gears | G-SDG | x | x |
| Eccentric spur gear | G-HG | x | x |
| Helical gears set | G-HDG | x | x |
| Defective helical gears | G-ESG | x | x |
| PC motor control kit | G-PCMK | x | x |
| PC Load Control Kit | G-PCLK | x | x |
| 1 HP AC motor with built-in rotor unbalance | G-UBM-1 | x | |
| 1 HP AC motor with built-in rotor misalignment system | G-MAM-1 | x | |
| 1 HP AC motor with built-in bowed rotor | G-BRM-1 | x | |
| 1 HP AC motor with built-in faulted bearings | G-FBM-1 | x | |
| 1 HP AC motor with built-in broken rotor bars | G-BRBM-1 | x | |
| 1 HP AC motor with stator winding faults | G-SSTM-1 | x | |
| 1 HP AC motor with voltage unbalance & single phasing | G-VUSM-1 | x |
Designed & Developed by iCX Infotech.